3d cloud point measurement
With the advantages of high resolution and acquisition rate dual-line-scan camera systems have been gradually studied for dynamic 3-D measurement. Ad Latest non-contact WLI technology.

What Are Point Clouds 5 Easy Facts That Explain Point Clouds
The composite Project or Category point.

. A 3D point cloud is often synthesized from depth measurements collected by sensors at different viewpoints. Withers height body length chest girth and chest width. Each point position has its set of Cartesian coordinates.
However the partial overexposure and the limited measurement depth range of dual-line-scan cameras are the two main elements. Measurements are computed server side by flat surface intersection on the point cloud of the Run of the used image only. Experience 3D Optical Metrolgy Backed by 10 generations of Bruker Technology.
Ad Latest non-contact WLI technology. The overall goal of this study was to develop a 3D imaging approach to measure size-related traits and bush shape that are relevant to mechanical harvesting. Accurate Repeatable Reliable measurements.
Withers height hip height chest depth heart girth ilium width hip joint width oblique body length hip length chest width. Although the quality of 3D scanners has improved greatly in recent years and they are employed at a growing scale for faster point acquisition for parts or applications where contact measurement systems cannot make it inevitable measurement errors in point cloud still occur. The measurement data represented by 3-D point clouds are however usually noisy and should be denoised to facilitate subsequent applications.
Measurements are computed server side by flat surface intersection on the point cloud of the Run of the used image only. Each measurement point contains XYZ coordinates as well as other. By identifying and tracking these changes mechanical.
The acquired measurements are typically both coarse in precision and corrupted by noise. These point map them in a way that represents their actual presence shape and form in the environment. A point cloud is a set of data points in space.
Software used may differ depending on the region. The inlet circle and the outlet circle of the fuel nozzle are both detected by the two-dimensional 2D Hough Transform HT method. Pointclouds are a collection of millions or billions of individual measurement points from the surface of objects.
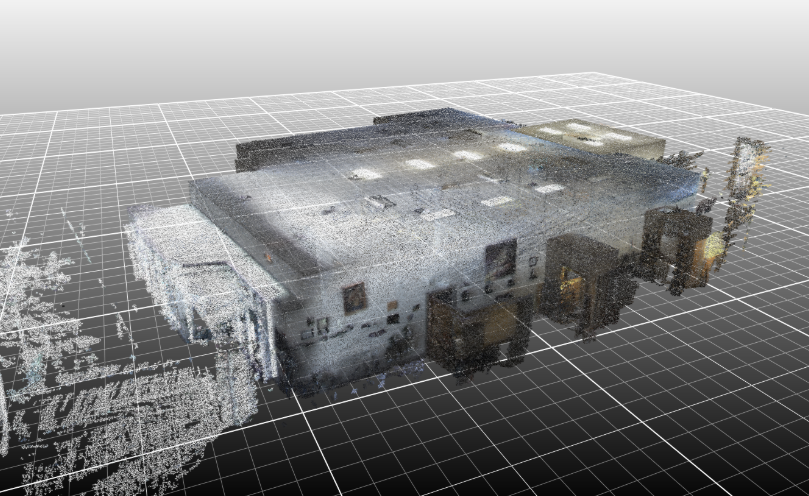
For example high definition 3d laser scanners such as the Riegl VZ-400i acquire millions of lidar measurement points per position. Experience 3D Optical Metrolgy Backed by 10 generations of Bruker Technology. The composite Project point cloud can be displayed as overlay on image according the server side point cloud legend setting.
As the output of 3D scanning processes point clouds are. This paper presents a new 3D point cloud change analysis approach for tracking small movements over time through localized spatial analytics. The 3-D surface measurement plays a significant role in the industrial area.
Accurate Repeatable Reliable measurements. Restoring point cloud data. The strategy includes three steps-firstly preprocessing 3D point cloud data completing the 3D plant registration through point cloud outlier filtering and.
The Orbit Publisher point cloud service does allow point cloud overlay and measurements. Point clouds are utilized to generate 3D meshes and other models for 3D modeling. To improve quality previous works denoise a synthesized 3D point cloud a posteriori after projecting the imperfect depth data onto 3D space.
It consists of millions of individual measurement points with an x y and z coordinate. The composite Project or Category point. They can be acquired by laser scanners drones or 3D cameras.
Various engineering and medical. This technique uses a combination of a direct point-wise distance metric in conjunction with statistical sampling to extract structural deformations. 3D scanning and point clouds measure the scope scale and volume of spaces and objects using x y and z vertices and their corresponding data points.
There are fewer deviation points in the three-dimensional 3D point cloud that are extracted from the sequence images. Point clouds are generally produced by 3D scanners or by photogrammetry software which measure many points on the external surfaces of objects around them. We propose a methodology for three-dimensional reconstruction under growing plants by Kinect v20 and explored the measure growth parameters based on three-dimensional 3D point cloud in this paper.
1 point position updating directly or 2 point normal filtering followed by point position updating and seldom consider the correlation between position updating and. Our goal is to respond to this critical challenge by bringing more precision to 3D scan systems. Our experiments show that the method yields better results in 3D detection of the key parameters of fuel nozzles with.
3D point clouds were acquired for 367. With a 90 confidence level measurement errors less than 3. The points may represent a 3D shape or object.
The Orbit Publisher point cloud service does allow point cloud overlay and measurements. A point cloud is a database of points that represent a digital 3D physical object or space in the 3D coordinate system. 3D Point cloud is a highly accurate digital record of an object.
Existing point cloud denoising methods typically perform. The aerial photographs taken by UAV and the laser scanner measurement data are restored by software as point group data having 3D coordinate values such as terrain features etc. The composite Project point cloud can be displayed as overlay on image according the server side point cloud legend setting.
State Of The Art In Point Cloud Analysis Book Chapter Iopscience

What Is The Difference Between A Point Cloud And A 3d Model Gisgro

Unsupervised Detection Of Vineyards By 3d Point Cloud Uav Photogrammetry For Precision Agriculture Sciencedirect
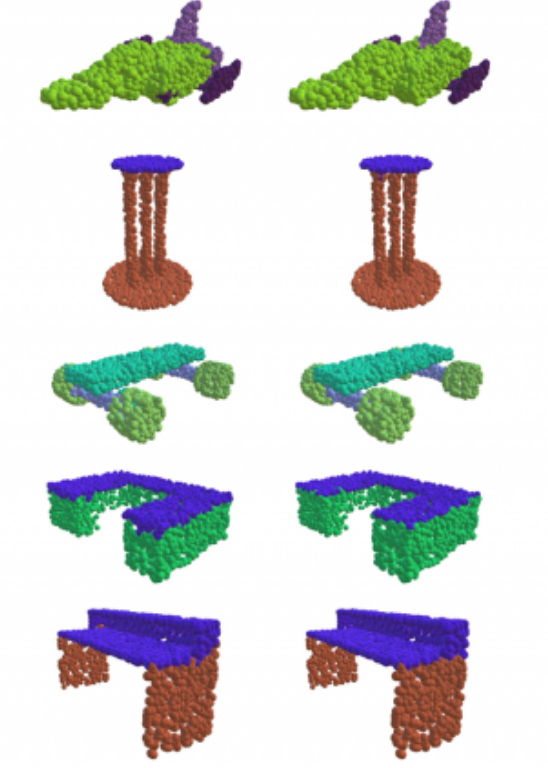
Deep Learning With Point Clouds Mit Csail
3d Point Cloud Data To 3d Mesh Conversion Geo Matching Com
Working With Lidar Data And Fme
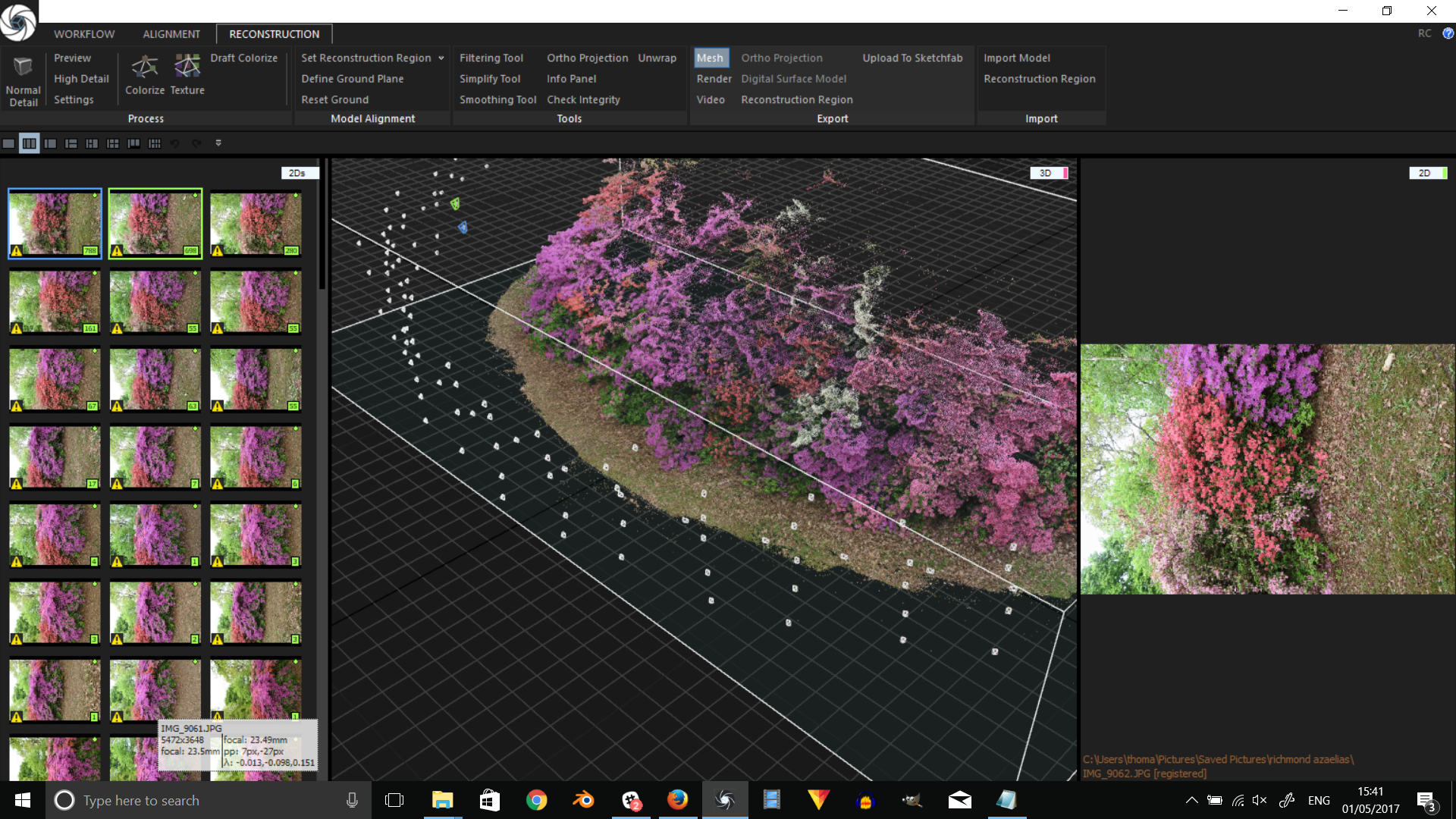
Tutorial How To Upload A Point Cloud From Reality Capture To Sketchfab Sketchfab Community Blog Sketchfab Community Blog
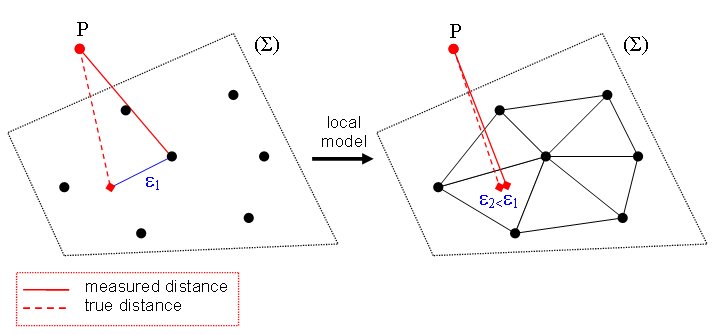
Distances Computation Cloudcomparewiki

What Are Point Clouds And How Are They Used Dronegenuity

Does Anyone Know Any Existing Algorithm To Find The External And Internal Boundary Points Of A Point Cloud

Point Cloud An Overview Sciencedirect Topics
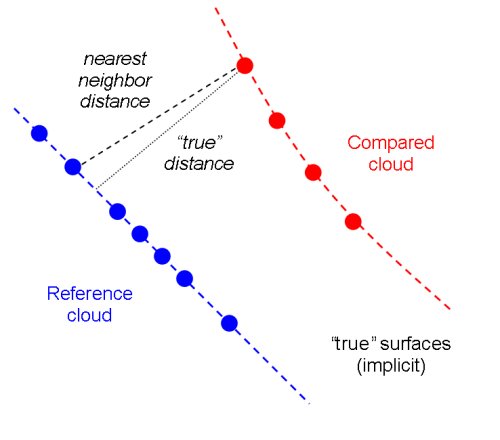
Distances Computation Cloudcomparewiki

Tutorial Processing Point Cloud Data With Unity Sketchfab Community Blog Sketchfab Community Blog

State Of The Art In Point Cloud Analysis Book Chapter Iopscience

What Are Point Clouds And How Are They Used Dronegenuity

Use Ground Truth To Label 3d Point Clouds Amazon Sagemaker

What Is The Difference Between A Point Cloud And A 3d Model Gisgro
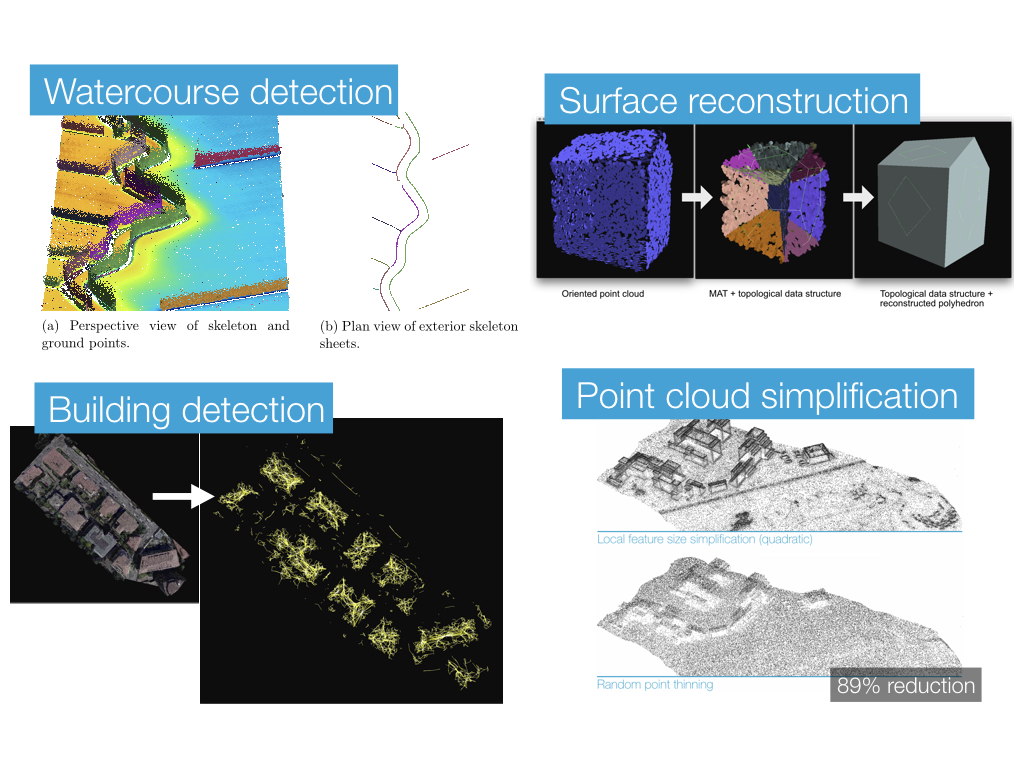
Point Cloud Modelling With The 3d Medial Axis Transform
3 D Point Cloud Registration And Stitching Matlab Simulink